
moacon:motorsetup:index
motorSetup
void motorSetup (u8 motionID, u8 stCh, u32 freqBase, u32 freqTop, u32 stepAccel)
| motionID : The ID of the Motion Control Module |
| stCh: The channel on the Motion Control Module (0 or 1) |
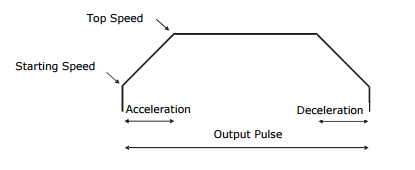
| freqBase: The starting frequency (speed) in Hz to be sent to the motor driver (maximum: 50KHz) |
| freqTop: The top frequency (speed) in Hz to be sent to the motor driver. |
| freqAccel: The acceleration/deceleration in Hz/sec to be sent to the motor driver |
Sets the starting speed, top speed, and acceleration/deceleration that the motor should use when the motor starts and stops. The motor is identified by the id of the Motion Control Module, motionID, and the module's channel, stCh.
#include "moacon500.h" //Waits for motor to finish moving void motorWaitToFinish(u8 motionId, u8 stChannel) { //Get the current number of pulses left to send u32 pulseCount = motorStat(motionId, stChannel); //While there are still pulses remaining (i.e. the motor is still moving) while(pulseCount > 0) { //Get the current number of pulses left to send pulseCount = motorStat(motionId, stChannel); //Print the number of pulses remaining to the debug console printf("%d pulses remaining\r\n", pulseCount); delay(500); //Give the CPU a break. } } void cmain(void) { motorSetup(0, 0, 500, 5000, 1000); //Initialize the motor setMotorPos(0,0,0); //Current position is at its starting position motorMove(0,0,100000); //Move the motor to position 100,000 motorWaitToFinish(0,0); //Wait for the motor to finish moving motorMove(0,0,0); //Move motor back to starting position motorWaitToFinish(0,0); //Wait for the motor to finish moving }
moacon/motorsetup/index.txt · Last modified: 2022/11/02 08:48 by COMFILE Technology